ĪĪĪĪū„š▀Ż║
ĪĪĪĪu-blox Č©╬╗«aŲĘųąą─Ė▀╝ē╩ūŽ»╣ż│╠Ĥ David Bartlett
ĪĪĪĪu-bloxŲ¹▄ćæ¬ė├╩ął÷▓┐žōž¤╚╦ Stefania Sesia ▓®╩┐
ĪĪĪĪūįäė±{±éŲ¹▄ćęč│╔×ķ«öĮ±ų„┴„├Į¾wĄ─¤ßūhįÆŅ}Ż¼Ą½╚¶ę¬īó¤o╚╦±{±é▄ć▌vū„×ķų„┴„┤¾▒Ŗ│÷ąą╣żŠ▀Ż¼╬ęéā▀Ćėąę╗ą®ĻPµI╝╝ągąĶę¬═Ļ╔ŲĪŻ
ĪĪĪĪĖ▀Š½Č╚Č©╬╗Š═╩ŪŲõųąę╗éĆąĶę¬ųž³cĻPūóĄ─ŅIė“ĪŻ×ķ┴╦│╔╣”ųŲįņ│÷Ę¹║ŽŲ¹▄ć╣ż│╠ĤīWĢ■┴∙╝ēūįäė╗»┴┐▒Ēųą╠Äė┌▌^Ė▀Ą╚╝ēĄ─▄ćą═Ż¼Ė▀Š½Č╚Č©╬╗╝╝ągąĶę¬ļSĢr═©▀^┐╔┐┐Ą─ĘĮ╩ĮīŹ¼FŠ½┤_ĄĮ└Õ├ū╝ēĄ─Č©╬╗ĪŻ
ĪĪĪĪ© SAE International
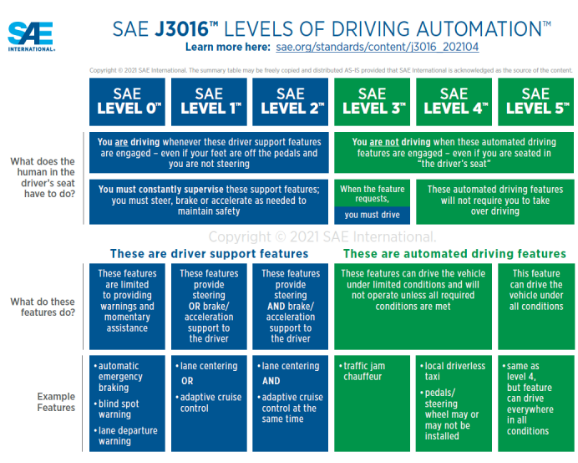
ĪĪĪĪłD 1Ż║Ų¹▄ć╣ż│╠ĤīWĢ■┴∙╝ēūįäė╗»┴┐▒Ē
ĪĪĪĪ╚╗Č°Ż¼┤¾ČÓöĄ¼F┤·Ų¹▄ćĄ─Č©╬╗ŽĄĮyŠ½Č╚╚į╚╗▀_▓╗ĄĮ▀@ĘN╦«ŲĮŻ¼¼Fį┌Ą─Ų¹▄ć═∙═∙╩╣ė├╚½Ū“ī¦║ĮąląŪŽĄĮy (GNSS) Įė╩šÖCŻ¼┼õ║ŽæTąį£y┴┐å╬į¬ (IMU) ║═└’│╠ėŗüĒīŹ¼FČ©╬╗ĪŻ╝┤▒Ń GNSS ąląŪą┼╠¢▒Ż│ų│÷╔½Ą─Įė╩šą¦╣¹Ż¼Ą½╚ń╣¹ø]ėąąŻš²Ę■䚯¼Ųõ╦«ŲĮŠ½Č╚╝s 2 ├ūĄĮ 5 ├ū(CEP)ĪŻ╚ń╣¹į┌│Ū╩ą╗“╩ęā╚Ą╚Ė³Å═ļsĄ─ŁhŠ│ųąŻ¼Š½Č╚▀ĆĢ■┤¾Ę∙┴ė╗»ĪŻ
ĪĪĪĪ═©▀^ UWB ║═ V2X Åøča GNSS Ą─Č╠░Õ
ĪĪĪĪ─┐Ū░Ż¼śIĮńš²ķ_░lĖ„ĘNĮŌøQĘĮ░ĖüĒæ¬ī” GNSS Ą─▀@ę╗Č╠░ÕŻ¼Ą½¼FėąĄ─Ė„ĘN╝╝ągČ╝┤µį┌ŠųŽ▐ąįŻ¼▓óø]─▄╠ß╣®į┌╦∙ėąŁhŠ│Ž┬Č╝┐╔ąąĄ─ĮŌøQĘĮ░ĖĪŻę“┤╦Ż¼╬┤üĒūįäė±{±éŲ¹▄ć▒ž╚╗īóę└┐┐ČÓ╝╝ąg╚┌║ŽĄ─╗ņ║ŽĮŌøQĘĮ░ĖüĒīŹ¼FĪŻ
ĪĪĪĪŲ∙Į±×ķų╣Ż¼ī” GNSS ĮY║ŽĄž├µ¤oŠĆļŖ╝╝ągüĒ╠ßĖ▀Ų¹▄ćČ©╬╗Š½Č╚ĘĮ├µĄ─蹊┐╚į╚╗ŽÓī”ģTĘ”ĪŻĘõĖC═©ą┼ V2X (C-V2X)ĪóIEEE 802.11p V2XĪóŲõ║¾└^╝╝ąg 802.11bd ║═│¼īÆĦ (UWB) Š∙▀m║Žė├ė┌Č╠ŠÓļx£yŠÓĪŻį┌ EN 302890(ųŪ─▄Į╗═©ŽĄĮy)ųąŻ¼V2X ITS ═©ą┼╝╝ąg▒╗┴ą×ķØōį┌Č©╬╗ĮŌøQĘĮ░ĖŻ¼Č°│¼īÆĦ (UWB) ╝╝ągį┌╩ęā╚æ¬ė├ęį╝░▄ćÅSĄ─├ŌĶĆ│ūķTµiĄ╚æ¬ė├ŅIė“Ą─░lš╣ä▌Ņ^╩«ĘųčĖ├═ĪŻ
ĪĪĪĪęį╔Ž╝╝ągĄ─░lš╣ų▓Į│╔╩ņŻ¼┐╔▀Mę╗▓Į╠ĮŠ┐Ųõū„×ķ GNSS ║═ IMUča│õĘĮ░ĖĄ─Øō┴”Ż¼ūŅĮKų¦│ųĖ³Ė▀Ą─▄ć▌vūįų„ąį╦«ŲĮĪŻu-blox ūŅĮ³▀Mąą┴╦ę╗ĒŚčąŠ┐Ż¼įu╣└į┌▓╔ė├ GNSS Ą─╗ņ║Ž╩ĮŲ¹▄ćī¦║ĮĮŌøQĘĮ░Ėųą╝{╚ļ IEEE 802.11p V2X ║═ UWBŻ¼ęįī”▒╚Ąž├µ¤oŠĆą┼╠¢£yŠÓĄ─ā×┴ėä▌ĪŻ╬ęéā▒Š┤╬£yįć─┐ś╦ų„ę¬╩Ū蹊┐╚┌║Ž╝╝ągį┌ūįäė±{±éæ¬ė├ł÷Š░ųąĄ─┐╔ąąąįŻ¼▓óĘų╬÷į┌╬┤üĒūįäė±{±é▄ć▌vųąšµš²▓╔ė├┤╦ŅÉ╗ņ║Žī¦║ĮĮŌøQĘĮ░ĖĢr┐╔─▄Ą─蹊┐ĘĮŽ“ĪŻ
ĪĪĪĪĄž├µ¤oŠĆ£yŠÓĄ─╣żū„įŁ└Ē
ĪĪĪĪĄž├µ¤oŠĆ£yŠÓŽĄĮyąĶę¬Į©┴ó╣╠Č©Ąž├µšŠŠWĮj(į┌ V2X ŽĄĮyųą═©│Ż▒╗ĘQ×ķ┬Ę▀ģå╬į¬ (RSU)),Ųõųą├┐éĆĄž├µšŠĄ─╬╗ų├Č╝╩Ūęčų¬Ą─ĪŻRSU Ģ■╗žÅ═▄ć▌v░l│÷Ą─ V2X ╗“ UWB ą┼╠¢Ż¼▄ć▌v£y┴┐ą┼╠¢Ą─═∙ĘĄĢrķgŻ¼▓óō■┤╦ėŗ╦Ń│÷ūį╔Ē┼cRSUų«ķgĄ─ŠÓļxĪŻ═©▀^╚²éĆ╗“Ė³ČÓŽÓī”ė┌▄ć▌v│╩¼FÄū║╬Ęų▓╝Ą─ RSU ł╠ąą┤╦▓┘ū„Ż¼╝┤┐╔┤_Č©▄ć▌v╬╗ų├ĪŻ
ĪĪĪĪ─ŻöMĄ─▒žę¬ąį
ĪĪĪĪ┤╦ŅÉĮŌøQĘĮ░ĖąĶę¬┤¾ęÄ─Ż RSU ▓┐╩Ż¼Č°─┐Ū░╔ą▓╗Š▀éõ▀@ĘNŚl╝■ĪŻī”ė┌╬ęéāĄ─蹊┐Č°čįŻ¼į┌│Ū╩ą╣½▒Ŗė├ĄžŁhŠ│ųą░▓čb║Ž▀mĄ─Ąž├µšŠŠWĮj▓╗Š▀éõ┐╔ąąąįŻ¼▓┐ĘųįŁę“į┌ė┌Ż¼ėąĻP┤╦ŅÉŁhŠ│Ž┬ UWB Ą─Ę©ęÄ▒O╣▄╚įį┌▓╗öÓ░lš╣═Ļ╔ŲĪŻę“┤╦Ż¼╬ęéāį┌ČÓéĆ╦ĮėąĄž«aų▄▀ģįO┴ó┴╦Õ^³cŻ¼║Ł╔wĄ─ŁhŠ│░³└©┐šĢńģ^ė“ĄĮ┤·▒Ē│Ū╩ąŁhŠ│Ą─ģ^ė“(└²╚ń╔╠śIł@ģ^)ĪŻ╬ęéāī” UWB ║═ V2X ą┼╠¢į┌▀@ą®ŁhŠ│ųąĄ─▒Ē¼F▀Mąą┴╦ÅVĘ║Ą─£y┴┐Ż¼Å─ųą╠ß╚Īįļ┬ĢĄ╚ąį─▄ĮyėŗöĄō■Ż¼▓óō■┤╦äōĮ©┴╦ę╗éĆßśī”£yŠÓąį─▄Ą─ąą×ķĘ┬šµ─Żą═ĪŻ
ĪĪĪĪ£yįćĘĮĘ©
ĪĪĪĪį┌×ķ▓╗═¼ŅÉą═Ą─ŁhŠ│(▐r┤ÕĪó│Ū╩ą║═╩ęā╚ŁhŠ│)Į©┴óąą×ķĘ┬šµ─Żą═║¾Ż¼╬ęéā▀Mąą┴╦öĄ┤╬šµīŹ╩└ĮńĄ─┬Ę£yŻ¼Ųõųą║Ł╔w░³└©╣½┬ĘĄ─Ė▀╦┘┬ĘČ╬ĪóĖ▀├▄Č╚│Ūģ^ĪóŅlĘ▒Ų═ŻĄ─ōĒČ┬Į╗═©ŁhŠ│ĪóĦėą┤¾┴┐ÅØĄ└Ą─ŁhŠ│Ż¼ęį╝░ ╦ĒĄ└Ą╚GNSS ą┼╠¢Įė╩š╩▄Ž▐╗“ø]ėąą┼╠¢Ą─ĄžĘĮĪŻ
ĪĪĪĪį┌±{±é▀^│╠ųąŻ¼╬ęéā╩š╝»┴╦ GNSS £y┴┐ųĄ║═╬╗ų├šµųĄĪŻį┌┤_Č© GNSS £y┴┐ųĄĢrŻ¼╬ęéā╩╣ė├Ą─╩Ūā╚ų├ IMU Ą─ u-blox NEO-M8L ─ŻēKĪŻ×ķ┤_šJĄž├µ╬╗ų├šµųĄŻ¼╬ęéā╩╣ė├┴╦ę╗éĆĖ▀Š½Č╚īŹĢräėæB (RTK) Įė╩šÖCĪóGNSS į÷ÅŖöĄō■Ę■äš║═ę╗éĆĖ▀ęÄĖ± IMUĪŻ
ĪĪĪĪ╬ęéāĖ∙ō■ŁhŠ│(Ė▀├▄Č╚│Ūģ^Īó╦ĒĄ└Īóķ_ķ¤Ól┤ÕĄ╚)ī”┬Ę£yöĄō■▀MąąĘųŅÉŻ¼ęį▒Ńį┌Ę┬šµųąæ¬ė├▀m«öĄ─įļ┬Ģ─Żą═ĪŻ
ĪĪĪĪļS║¾Ė∙ō■▀xō±Ą─├▄Č╚║═Ęų▓╝ęÄätĘų┼õ RSU ╬╗ų├Ż¼▓óį÷╝ė 2 ├ūĄ─ļSÖCĖ▀Č╚ūā╗»Ż¼ęį▒▄├Ō╝āŲĮ├µ▓┐╩ĪŻ╬ęéā╩╣ė├▓╗═¼öĄ┴┐Ą─ RSU ▀Mąą┴╦£yįćŻ¼ęį▒Ń┴╦ĮŌąĶę¬ČÓ╔┘éĆ RSU ▓┼─▄▀_ĄĮ▒žę¬Ą─Č©╬╗Š½Č╚╦«ŲĮĪŻ
ĪĪĪĪļS║¾įOų├Ņ~═ŌĄ─Ę┬šµūā┴┐Ż¼╚ń£yŠÓĢrķg┤┴Ą─£╩┤_ąįĪŻ
ĪĪĪĪ═Ļ│╔╦∙ėą▀@ą®╣żū„║¾Ż¼╬ęéā═©▀^Ę┬šµŻ¼╔·│╔┴╦├┐éĆ£yŠÓÜvį¬Ą─ RSU ┼cšµīŹ╬╗ų├ų«ķgĄ─įŁ╩╝öĄō■ĪŻų«║¾Ż¼╬ęéāųéĆśė▒Š╠Ē╝ėįļ┬ĢŻ¼▓óīóė╔┤╦Ą├ĄĮĘ┬šµĮY╣¹┼cīŹ£yųąėøõøĄ─ GNSS £y┴┐ųĄš¹║ŽĪŻ
ĪĪĪĪų„ę¬ĮYšō
ĪĪĪĪ═©▀^Ę┬šµŻ¼╬ęéāĄ├ęį╔·│╔ąį─▄ĮyėŗöĄō■Ż¼Å─Č°ĘĮ▒ŃĄžīó╗ņė├┴╦ GNSS+V2X ║═ GNSS+UWB Ą─ĮŌøQĘĮ░Ė┼cé„Įy GNSS+IMU ĮŌøQĘĮ░Ė(┼c«öĮ±ų„┴„▄ć▌vųą╦∙ė├Ą─ĮŌøQĘĮ░ĖŽÓ╦Ų)▀Mąąī”▒╚ĪŻ
ĪĪĪĪłD 2 š╣╩Š┴╦╚²ĘNĮŌøQĘĮ░ĖĄ─ąį─▄Ż║

ĪĪĪĪłD 2Ż║╚²ĘNī¦║ĮĘĮ░ĖĄ─£yįćąį─▄ĮY╣¹
ĪĪĪĪ┐é¾wüĒ┐┤Ż¼╬ęéā░l¼F GNSS+V2X (IEEE 802.11p) ŽĄĮyĄ─ąį─▄┼c╩╣ė├ś╦£╩Č©╬╗Ą─é„Įy GNSS+IMU(DR) ĮŌøQĘĮ░ĖŽÓ╦ŲĪŻį┌Įė╩š▓╗ĄĮ GNSS ą┼╠¢╗“ą┼╠¢ÅŖČ╚ć└ųžŽ┬ĮĄĄ─ŪķørŽ┬Ż¼IMU ę▓Ģ■╩¦╚źŲõārųĄŻ¼ę“×ķ IMU ę└┐┐│ų└m▓╗ķgöÓĄ─ GNSS ą┼╠¢Įė╩šüĒ▒Ż│ųąŻ£╩ĪŻį┌▀@└’Ż¼╗∙ė┌ V2X Ą─Č©╬╗ĮŌøQĘĮ░Ėī”ė┌ī¦║Į╩ŪėąārųĄĄ─ĪŻĄ½×ķ┴╦▀_ĄĮūįäė±{±é╦∙ę¬Ū¾Ą─Š½Č╚║══Ļš¹ąį╦«ŲĮŻ¼╬ęéā▀ĆąĶę¬ķ_š╣▀Mę╗▓Į╣żū„Ż¼░³└©čąŠ┐ IMU į┌Ė▀═Ļš¹ąįĪóĖ▀Š½Č╚Č©╬╗ųąĄ─ū„ė├ĪŻłD 2Ż║╚²ĘNī¦║ĮĘĮ░ĖĄ─£yįćąį─▄ĮY╣¹
ĪĪĪĪGNSS+UWB ╗ņ║ŽŽĄĮyĄ─ąį─▄ę¬├„’@Ė▀ė┌Ųõ╦¹ĘĮ░ĖŻ¼ĮėĮ³╩╣ė├╗∙ė┌ RTK Ą─ GNSS į÷ÅŖĘ■äš╦∙─▄▀_ĄĮĄ─╦«ŲĮĪŻ╬ęéāĄ─£yį接Įy╩╣ė├ 0.67 Hz Ą─Č©╬╗Ė³ą┬┬╩Ż¼Š½Č╚┐╔ĮėĮ³ 10 └Õ├ūŻ¼Ą½╬ęéāŲ┌═¹╬┤üĒ╔·«a╝ēŽĄĮy─▄▀_ĄĮ V2X ųąÅVĘ║╩╣ė├Ą─ĪóĖ³│ŻęŖĄ─ 10 Hz Č©╬╗Ė³ą┬┬╩ĪŻ
ĪĪĪĪīó 10 Hz Ą─ UWB £yŠÓŽĄĮy┼c╩╣ė├ąŻš²öĄō■Ą─Ė▀Š½Č╚ GNSS ŽĄĮyĮY║Ž╩╣ė├Ż¼æ¬┐╔į┌┤¾ČÓöĄŪķørŽ┬▀_ĄĮ 10 └Õ├ū╝ēäeĄ─Š½Č╚ĪŻ╩┬īŹęčĮøūC├„Ż¼╩╣ė├ąŻš²öĄō■Ą─ GNSS ─▄į┌ķ_Ę┼ģ^ė“║═Ė▀╦┘╣½┬Ę╔ŽīŹ¼F▀@ĘNŠ½Č╚╦«ŲĮĪŻ═©▀^į┌│Ū╩ąŁhŠ│ųą▓┐╩ RSU ŠWĮjŻ¼UWB ╝┤┐╔į┌ļyęįĮė╩šąląŪą┼╠¢Ą─ŪķørŽ┬ū„×ķĖ▀Š½Č╚ GNSSĘĮ░ĖĄ─ča│õĪŻ
ĪĪĪĪĄ½ UWB Ą─ĘČć·ėąŽ▐Ż¼į┘┐╝æ]ĄĮ─┐Ū░┼cæ¶═Ō╩╣ė├ŽÓĻPĄ─▒O╣▄Ž▐ųŲŻ¼Ųõ─┐Ū░īŹė├ąįėąŽ▐ĪŻėąĶbė┌┤╦Ż¼▀@ĒŚ╝╝ąg┐╔─▄▒╚▌^▀m║Ž╩ęā╚ģ^ė“╬óī¦║ĮŻ¼▒╚╚ń═Ż▄ćł÷ī¦║ĮĪŻ
ĪĪĪĪŲõ╦¹Įø“×åó╩Š
ĪĪĪĪ▀@ĒŚčąŠ┐ĦüĒ┴╦Ųõ╦¹ę╗ą®ųžę¬Įø“×åó╩ŠĪŻ╩ūŽ╚Ż¼į┌╗ņ║ŽĘĮ░Ėųą│² GNSS ų«═ŌŻ¼╝┤╩╣ų╗▓┐╩ā╔éĆ RSUŻ¼ę▓ėą├„’@Ą─ā×ä▌ĪŻ
ĪĪĪĪĄ┌Č■Ż¼×ķ▒ŻūCČ©╬╗ŽĄĮy£╩┤_£yČ©▄ć▌v╦∙į┌Ė▀Č╚Ż¼RSU Ą─Ė▀Č╚ūā╗»▒ž▓╗┐╔╔┘Ż¼ė╚Ųõ╩Ūį┌╩╣ė├ V2X ╝╝ągĢrĪŻ×ķ┴╦┤_▒Ż▄ć▌vį┌ėąČÓéĆ▓╗═¼Ė▀Č╚īė╝ēĄ─Ą└┬Ę╔Ž(▒╚╚ńČÓīė┴óĮ╗ś“)░▓╚½ąą±éŻ¼▀@ė╚×ķųžę¬ĪŻ
ĪĪĪĪĄ┌╚²Ż¼╬ęéā│╔╣”Į©┴ó┴╦ę╗éĆ╗ņ║Ž×V▓©Ų„Ż¼╠Ä└ĒüĒūį V2XĪóUWB ║═ GNSS ŽĄĮyĄ─ą┼╠¢Ż¼▓óŪę¤o┐p╠Ä└ĒāHėą GNSS Ą─ģ^ė“(╬┤▓┐╩ RSU)║═āHėąĻæĄž£yŠÓĄ─ģ^ė“(╚ń╦ĒĄ└)ų«ķgĄ─▀^Č╔ĪŻ
ĪĪĪĪĄ┌╦─Ż¼▒M╣▄ĻæĄž£yŠÓį┌▀@ę╗æ¬ė├ŅIė“▒Ē¼F│÷┴╦▓╗ÕeĄ─Ū░Š░Ż¼Ą½║▄ļy▒▄ķ_ŁhŠ│║═ČÓÅĮą¦æ¬Ą─ė░ĒæĪŻ╝┤╩╣╩Ū UWBŻ¼ėąĢrę▓Ģ■╩▄ĄĮĘŪęĢŠÓą┼╠¢é„▓źĄ─ė░ĒæĪŻ
ĪĪĪĪūŅ║¾Ż¼GNSS ┼cĻæĄž£yŠÓų«ķgĄ─Š½┤_ĢrķgąŻ£╩ę▓╩Ūę╗éĆĻPµIę“╦žĪŻ╬ęéāūŅ│§ŅAėŗąŻ£╩ĄĮöĄ║┴├ļ▒ŃūŃęįØMūŃąĶŪ¾Ż¼Ą½į┌īŹļHųąŻ¼╬ęéā░l¼Fėą▒žę¬▀_ĄĮ 100 ╬ó├ļęįŽ┬ĪŻ
ĪĪĪĪ║¾└m┼e┤ļ
ĪĪĪĪ▀@ĒŚčąŠ┐š╣╩Š┴╦╩╣ė├Č╠│╠═©ą┼£yŠÓ╝╝ągča│õ«öĮ±▄ć▌v▓┐╩Ą─Č©╬╗╝╝ąg║═Ę■䚥─Øō┴”ĪŻ▒M╣▄╚ń┤╦Ż¼ę¬═©▀^▀@ĒŚ╝╝ągšµš²═Ųäė╬┤üĒūįų„▄ć▌v░lš╣Ż¼▀ĆąĶę¬ØMūŃĖ³ČÓŪ░╠ߌl╝■Ż¼ė╚Ųõ╩Ūį┌▒O╣▄ĘĮ├µĪŻ└²╚ńŻ¼ąĶę¬×ķ┤╦æ¬ė├½@Ą├į┌æ¶═Ō╩╣ė├ UWB Ą─įS┐╔Ż¼▓óŪęąĶę¬ÅVĘ║▓┐╩Š▀ėą UWB ╣”─▄Ą─ RSUĪŻ┤╦═ŌŻ¼į┌▓┐╩╚╬║╬ŅÉą═Ą─ RSU ĢrŻ¼Č╝ąĶę¬┐╝æ]ĄĮ RSU ┐╔─▄Ģ■ė├ū„Č©╬╗Õ^³cŻ¼Č°▓╗āHāH╩Ū═©ą┼įOéõĪŻ▀ĆąĶę¬×ķ V2X Ęų┼õĖ³ČÓĄ─¤oŠĆŅlūV║═Ė³īÆĄ─ą┼Ą└Ż¼▓óŪęąĶę¬īóČ©╬╗╗∙į¬║═ą┼╠¢╝{╚ļ V2X ś╦£╩ĪŻ
ĪĪĪĪę╗éĆųĄĄ├▀Mę╗▓Į╠ĮŠ┐Ą─ŽÓĻPŅIė“╩Ū╩╣ė├ UWB £yŠÓüĒ▒ŻūoĮ╗═©╚§ä▌╚║¾w (VRU)Ż¼╚ńąą╚╦║═“Tąąš▀ĪŻ¼F┤·ųŪ─▄╩ųÖC║═Ų¹▄ćŠ∙▓╔ė├┴╦ UWB ╝╝ągŻ¼ę“┤╦╬ęéāėąÖCĢ■└¹ė├▀@ĘNŚl╝■Ż¼ūīūįų„▄ć▌vĖ³║├Ąž┴╦ĮŌŲõų▄▀ģĄ─ VRU ╬╗ų├ĪŻ
ĪĪĪĪ╚ń╣¹─·Žļ▀Mę╗▓Į┴╦ĮŌ▒ŠčąŠ┐Īó蹊┐ĘĮĘ©╗“ĮYšōŻ¼╬ęéā║▄śĘęŌ┼c─·ĘųŽĒĪŻšł░lļŖūėÓ]╝■ų┴ David.Bartlett@u-blox.com ┬ōŽĄ╬ęéāĪŻ
ĪĪĪĪu-blox║åĮķ
ĪĪĪĪ╚╩┐ u-blox ╣½╦Š (SIX:UBXN) ╩Ū×ķŲ¹▄ćĪó╣żśI║═Ž¹┘M╩ął÷╠ß╣®Č©╬╗║═¤oŠĆ═©ą┼╝╝ągĄ─ŅIŽ╚╣®æ¬╔╠ĪŻŲõĮŌøQĘĮ░Ė─▄£╩┤_▀Mąą╚╦åTĪó▄ć▌v║═ÖCŲ„Ą─Č©╬╗Ż¼▓ó═©▀^ĘõĖCŠWĮj║═Č╠│╠═©ą┼ŠWĮjīŹ¼F¤oŠĆ═©ą┼ĪŻæ{ĮĶÅVĘ║╝░ČÓśė╗»Ą─ąŠŲ¼Īó─ŻēK║═╚šęµöU┤¾Ą─«aŲĘų¦│ųöĄō■Ę■äš╔·æBŽĄĮyŻ¼u-blox ╣½╦Šį┌Ä═ų·Ųõ┐═æ¶ßśī”╬’┬ōŠW┐ņ╦┘Č°│╔▒ŠĖ▀ą¦Ąžķ_░läōą┬ĮŌøQĘĮ░ĖĘĮ├µŠ▀ėąĄ├╠ņ¬Ü║±Ą─ā×ä▌ĪŻu-blox ╣½╦Š┐é▓┐įOį┌╚╩┐╦■Ā¢ŠSĀ¢Ż¼─┐Ū░į┌ÜWų▐Īóüåų▐║═├└ć°Č╝įOėą▐k╩┬╠ÄĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
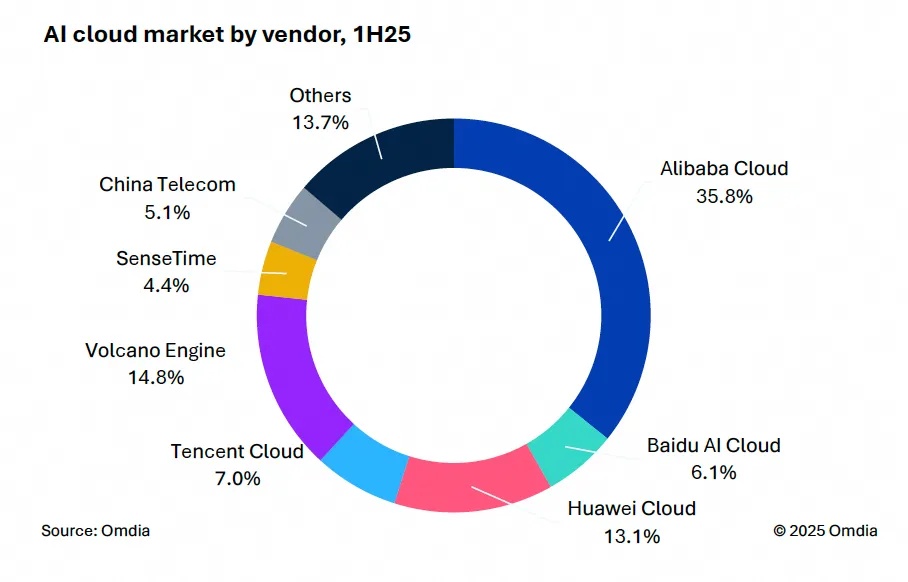
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ

IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.lixinerzhong.com ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w