ĪĪĪĪ╣Ō▓©ī¦╩Ūę╗ĘN┐╔ęį═©▀^╚½ā╚Ę┤╔õę²ī¦╣Ō╩°Ą─╣ŌīWį¬╝■ĪŻ▓©ī¦┐╔ęį╩Ū“ČÓ─Ż”ą╬╩ĮŻ¼ę“×ķŲõ╬’└Ē│▀┤ńūŃęįų¦│ųę╗ŽĄ┴ą“─Ż╩Į”ĪŻ╝┤ĮoČ©ą┼Ą└═©▀^▓©ī¦Ą─┐šķg┬ĘÅĮŻ¼└²╚ńī”æ¬ė┌▓╗═¼Ą─é„▓źĘĮŽ“ĪŻČÓ─Ż╣Ō▓©ī¦į╩įS═©▀^▓©ī¦ā╚Ą─ĮŪČ╚ūā╗»üĒé„▌öĖ³ČÓĄ─öĄō■ĪŻ
ĪĪĪĪōQčįų«Ż¼ČÓ─Ż▓©ī¦═©▀^į÷╝ėĮŪČ╚║═/╗“┐šķgĘų╝»Ż¼×ķ╚╬║╬ĮoČ©ą┼Ą└╠ß╣®Å─░l╔õŲ„ĄĮÖz£yŲ„Ą─ČÓŚl╣Ō┬ĘŻ¼Å─Č°╠ß╣®Ė³┤¾Ą─ĦīÆ(▓╗═¼Ą─┬ĘÅĮī”æ¬ė┌▓╗═¼Ą─é„▓ź─Ż╩Į)ĪŻ
ĪĪĪĪČÓ─Ż▓©ī¦ęčĮøė├ė┌└²╚ńŅ^’@Ą╚╗∙ė┌▓©ī¦Ą─’@╩ŠŽĄĮyųąĪŻį┌▀@ĘNŪķørŽ┬Ż¼ČÓ─Ż▓©ī¦═©│ŻīółDŽ±Å─’@╩ŠŲ„╗“╣Ōę²Ūµé„╦═ĄĮė├æ¶Ą─č█Š”Ż¼Ųõą╬╩Į╩╣Ą├łDŽ±┐╔ęįė╔č█Š”Ą─╣ŌīWŲ„╝■ųžĮ©Ż¼Å─Č°▒╗╚╦ŅÉė├æ¶Ėąų¬ĪŻ▓ŅĘų╣ŌīWŲ„╝■┐╔ęįė├ė┌╠ß╣®╣Ō╩°öUš╣Ż¼▓ó┤_▒Ż▀M╚ļ║═ļxķ_▓©ī¦Ą─╣Ō╩°▒Ż┴¶įŁ╩╝łDŽ±Ż¼╩╣Ą├č█Š”┐╔ęįųžĮ©įŁ╩╝łDŽ±ĪŻ
ĪĪĪĪŠ▀ėąę╗éĆ╗“ČÓéĆėąį┤ķ_ĻPį¬╝■╗“Ųõ╦¹ī¦Ž“į¬╝■Ą─▓©ī¦ĘQ×ķėąį┤ī¦╣Ō╣▄ĪŻ¤oį┤ī¦╣Ō╣▄ät╩ŪųĖŠ▀ėą▓╗═¼╣ŌīWņ`├¶Č╚(└²╚ń▓╗═¼▓©ķL║═/╗“Ų½š±ņ`├¶Č╚)Ą─ę²ī¦į¬╝■Ą─ī¦ī¦╣Ō╣▄ĪŻ
ĪĪĪĪöĄūųłDŽ±(╗“ŠÄ┤a×ķöĄūųłDŽ±Ą─öĄō■)┐╔ęįū„×ķ╣Ō╩°čžų°ėąį┤╗“¤oį┤ī¦╣Ō╣▄é„▓źĪŻėąį┤ī¦╣Ō╣▄Ą─ę²ī¦į¬╝■┐╔ęįå╬¬Ü┐žųŲęį═Ė╔õ╗“Ę┤╔õ╚ļ╔õ╣Ō╩°ĪŻ
ĪĪĪĪį┌├¹×ķ“Optical data transfer”Ą─īŻ└¹╔ĻšłųąŻ¼╬ó▄øĮķĮB┴╦ę╗ĘN╩╣ė├┴╦ėąį┤ī¦╣Ō╣▄Ą─ŽÓĻP╣ŌīWöĄō■é„▌öŽĄĮyĪŻ
ĪĪĪĪŲõųąŻ¼▓©╩°š{ųŲŲ„┼õų├×ķį┌▌ö╚ļ▓©╩°ųąŪČ╚ļę╗ĮMöĄō■ĪŻČÓ─Ż╣Ō▓©ī¦ŠWĮjŠ▀ėąė├ė┌Įė╩š▌ö╚ļ╣Ō╩°Ą─±Ņ╚ļģ^ė“ĪŻČÓ─Ż╣Ō▓©ī¦ŠWĮj┼õų├×ķīó▌ö╚ļ╣Ō╩°ę²ī¦ĄĮČÓ─Ż╣Ō▓©ī¦ŠWĄ─±Ņ│÷ģ^ė“ĪŻ┐šķgŽÓĖ╔Öz£yŲ„┼õų├×ķ£y┴┐ČÓéĆ╬╗ų├╠ÄĄ─▌ö│÷╣Ōł÷Ą─ŽÓ╬╗║═š±Ę∙ĪŻ
ĪĪĪĪ▌ö│÷╣Ōł÷ų┴╔┘▓┐ĘųĄžė╔▌ö╚ļ╣Ō╩°Ž▐Č©Ż¼▓óŪęę“┤╦▒Ē¼F│÷ė╔╣Ō╩°═©▀^ČÓ─Ż▓©ī¦ŠWĮję²ŲĄ─╩¦šµą¦æ¬ĪŻų┴╔┘ę╗éĆ╠Ä└ĒŲ„±Ņ║ŽĄĮ┐šķgŽÓĖ╔Öz£yŲ„Ż¼▓óŪę┼õų├×ķīóą┼╠¢╠Ä└Ēæ¬ė├ė┌┐šķgŽÓĖ╔Öz£yŲ„Ą─▌ö│÷Ż¼ęį▒Ńčaāö╦∙╩÷╩¦šµą¦æ¬Ż¼Å─Č°Å─┐šķgŽÓĖ╔Öz£yŲ„▌ö│÷╗ųÅ═ŪČ╚ļį┌▌ö╚ļ▓©╩°ųąĄ─öĄō■╝»ųąĪŻ

ĪĪĪĪłD3A-D╩Š│÷┴╦Š▀ėą╠žČ©╬’└ĒĮYśŗĄ─ėąį┤ī¦╣Ō╣▄300Ą─╩Š└²ą╬╩ĮĄ─╩ŠęŌąįé╚ęĢłDĪŻėąį┤ī¦╣Ō╣▄300’@╩Š×ķŠ▀ėąų┴╔┘Ą┌ę╗▒Ē├µģ^ė“300–0║═ČÓéĆ┐╔ŪąōQ▓╝└ŁĖ±╣Ō¢┼(SBG)ą╬╩ĮĄ─ėąį┤ķ_ĻPŻ¼Ųõ┐╔ęįį┌ŪČ╚ļĄ─▒Ē├µ╗“¾wĘe╔ŽĪŻ
ĪĪĪĪį┌╦∙╩÷╩Š└²ųąŻ¼į┌▓©ī¦300Ą─Ą┌ę╗▒Ē├µ300-S1╔Ž╩Š│÷┴╦ā╔éĆ▀@śėĄ─SBG 300–1Īó300–2ĪŻ├┐éĆSBG 300–1Īó300–2Č╝┐╔ęįå╬¬Ü┐žųŲŻ¼ęįĖ─ūāŲõĘ┤╔õ/═Ė╔õī┘ąįŻ¼Å─Č°é„▌ö╗“Ę┤╔õ╚ļ╔õ╣Ō╩°ĪŻSBG 300–1Īó300–2ą╬│╔ėąį┤ī¦╣Ō╣▄300Ą─ŽÓæ¬▒Ē├µģ^ė“Ż¼Ė∙ō■▓©ī¦300Ą─╩╣ė├ĘĮ╩ĮŻ¼╣Ō┐╔ęįį┌╦∙╩÷▒Ē├µģ^ė“▀M╚ļ▓©ī¦300(±Ņ╚ļ)╗“ļxķ_▓©ī¦300(±Ņ│÷)ĪŻ
ĪĪĪĪĄ┌ę╗▒Ē├µģ^ė“300-0╩Ū▓©ī¦300Ą─Č╦▓┐ģ^ė“Ż¼▓©ī¦Ą─Ą┌ę╗é╚▒Ē├µ300-S1Å─Č╦▓┐ģ^ė“čžų°▓©ī¦300Ą─▌SŠĆ301čė╔ņĪŻ
ĪĪĪĪłD3E║═3FĖ„ūį╩Š│÷┴╦▓©ī¦300Ą─Įž├µłDĪŻį┌╦∙╩÷╩Š└²ųąŻ¼┐╔ęį┐┤ĄĮ▓©ī¦300╩ŪŠžą╬Ą─Įž├µą╬ĀŅŻ¼▓óŠ▀ėąčžų°▓©ī¦300▌SŠĆ301čė╔ņĄ─╦─éĆé╚▒Ē├µ300-S1Īó300-S2Īó300-S2║═300-S4ĪŻį┌▀@éĆ└²ūėųąŻ¼SBG 300–1Īó300–2Č╝čžų°Ą┌ę╗éĆé╚▒Ē├µ300-S1Č©╬╗ĪŻ
ĪĪĪĪSBG 300–1Īó300–2čžų°▓©ī¦300-S1Ą─Ą┌ę╗é╚▒Ē├µ┼cĄ┌ę╗ģ^ė“300–0Ą─ŠÓļxįĮüĒįĮ▀hŻ¼ŲõųąĄ┌ę╗SBG 300-1╬╗ė┌ūŅ┐┐Į³Ą┌ę╗ģ^ė“300-0Ą─╬╗ų├ĪŻ
ĪĪĪĪłD3AĪó3B║═3E├Ķ└L┴╦“ę╗ī”ČÓ”Ą─╩╣ė├ŪķørŻ¼ŲõųąSBG 300–1Īó300–2Ą─Ą┌ę╗▒Ē├µģ^ė“300–0│õ«ö±Ņ╚ļģ^ė“Ż¼Č°Ą┌Č■▒Ē├µģ^ė“300-1│õ«ö±Ņ│÷ģ^ė“ĪŻū„×ķ╩Š└²Ż¼łD3╩Š│÷┴╦Įøė╔±Ņ╚ļģ^ė“300–0±Ņ║ŽĄĮ▓©ī¦300ųąĄ─Ą┌ę╗╣ŌŠĆ304ĪŻ
ĪĪĪĪį┌╦∙╩÷╩Š└²ųąŻ¼Ą┌ę╗▒Ē├µģ^ė“300–0ŽÓī”ė┌é╚▒Ē├µ300-S1…300-S4Ż¼╩╣Ą├Ą┌ę╗╣ŌŠĆ304┐╔ęįęįūŃęįį┌├┐éĆé╚▒Ē├µīŹ¼F╚½ā╚Ę┤╔õĄ─ĮŪČ╚┤®▀^Ą┌ę╗▒Ē├µģ^ė“▀M╚ļ▓©ī¦300Ą─ų„¾wĪŻ
ĪĪĪĪSBG 300–1Īó300–2ųąĄ─├┐ę╗éĆČ╝┐╔┼õų├×ķį┌Ę┤╔õĀŅæB║══Ė╔õĀŅæBų«ķgĖ─ūāĪŻłD3A╩Š│÷┴╦ę╗ĘN┼õų├Ż¼ŲõųąĄ┌ę╗SBG 300–1╠Äė┌Ę┤╔õĀŅæBŻ¼ī¦ų┬╚ļ╔õ╣ŌŠĆ300Å─ŲõĘ┤╔õŻ¼╗žĄĮ▓©ī¦300ųąŻ¼▓óčžų°▓©ī¦300▒╗ę²ī¦Ż¼ų▒ĄĮĄĮ▀_Ą┌Č■SBG 300-2ĪŻ
ĪĪĪĪSBG 300–2’@╩Š×ķ╠Äė┌═Ė╔õĀŅæBŻ¼ī¦ų┬╣ŌŠĆ304═©▀^Ą┌Č■SBG 300-2č▄╔õ│÷▓©ī¦300Ż¼Å─Č°═©▀^Ą┌Č■SBG 300–2Ą─▒Ē├µģ^ė“±Ņ│÷▓©ī¦300ĪŻSBG 300–1300–2Ą─▀@ĘN┼õų├į┌Ą┌ę╗▒Ē├µģ^ė“300–0║═Ą┌Č■SBG 300-2Ą─▒Ē├µģ^ė“ų«ķgäōĮ©┴╦ę╗éĆ═©▀^▓©ī¦300Ą─═©Ą└ĪŻ
ĪĪĪĪŽÓ▒╚ų«Ž┬Ż¼łD3B’@╩Š┴╦╠Äė┌═Ė╔õĀŅæBĄ─Ą┌ę╗SBG 300–1ĪŻę“┤╦Ż¼Ą┌ę╗╔õŠĆ304į┌ĄĮ▀_Ą┌ę╗SBG 300–1ĢrŻ¼Č°╩ŪĮøė╔Ą┌ę╗SBG 300-1č▄╔õ│÷▓©ī¦300Ż¼Å─Č°Įøė╔Ą┌ę╗SBG300–1Ą─▒Ē├µģ^ė“±Ņ│÷▓©ī¦300ĪŻ▀@ĘN┼õų├į┌Ą┌ę╗▒Ē├µģ^ė“300–0║═Ą┌ę╗SBG 300–1Ą─▒Ē├µģ^ė“ų«ķgäōĮ©┴╦═©▀^▓©ī¦300Ą─═©Ą└ĪŻ
ĪĪĪĪęį▀@ĘNĘĮ╩ĮŻ¼┐╔ęįę²ī¦Ą┌ę╗╣ŌŠĆ304Å─Ą┌ę╗ģ^ė“300–0┤®▀^▓©ī¦300Ż¼▓óį┌SBG 300–1Īó300–2ųąĄ─╚╬║╬ę╗éĆĄ─▒Ē├µģ^ė“╠Äļxķ_▓©ī¦300ĪŻ
ĪĪĪĪłD3E╩Š│÷┴╦«öį┌ÖMĮž├µųąė^▓ņĢrĄ┌ę╗╔õŠĆ304╚ń║╬Įøė╔TIRÅ─é╚├µųąĄ─ę╗ą®╗“╚½▓┐é„▓źŻ¼▀@╚ĪøQė┌Ą┌ę╗╣ŌŠĆ304Ą─ĮŪČ╚ĪŻ
ĪĪĪĪ═¼śė┐╔ąąĄ─╩ŪŻ¼╚ńłD3CĪó3D║═3F╦∙╩ŠŻ¼╩╣ė├╦∙╩ŠĄ─ėąį┤ī¦╣Ō╣▄300▀MąąČÓī”ę╗╣ŌīWé„▌öĪŻ
ĪĪĪĪłD3C╩Š│÷┴╦┼cłD3AŽÓ═¼Ą─SBGĄ─┼õų├ĪŻ╬©ę╗Ą─ģ^äe╩Ū╚ń║╬╩╣ė├▓©ī¦300ĪŻ¼Fį┌Ą┌Č■Śl╣ŌŠĆ308’@╩Š×ķÅ─═Ō▓┐į┤(╬┤’@╩Š)╚ļ╔õĄĮĄ┌Č■éĆSBG 300–2╔ŽĪŻį┌Ą┌Č■SBG╠Äė┌═Ė╔õĀŅæBĄ─ŪķørŽ┬Ż¼Ą┌Č■╣ŌŠĆ308Įøė╔Ą┌Č■SBGč▄╔õĄĮ▓©ī¦300ųąŻ¼Å─Ą┌Č■SBC═©▀^▓©ī¦300▒╗ę²ī¦ĄĮĄ┌ę╗▒Ē├µģ^ė“300-0ĪŻ
ĪĪĪĪ▀@░³└©üĒūį«öŪ░╠Äė┌Ę┤╔õĀŅæBĄ─Ą┌ę╗SBG 300–1Ą─Ę┤╔õĪŻĄ┌ę╗SBG 300–1Ą─Ę┤╔õĀŅæBĘ└ų╣╣ŌŠĆ308═©▀^Ą┌ę╗SBG 300-1ļxķ_▓©ī¦ĪŻ┴Ē═ŌŻ¼┐╔─▄┼÷Ū╔╚ļ╔õĄĮĄ┌ę╗SBG 300–1╔ŽĄ─╚╬║╬═Ō▓┐╣ŌŠĆ309īó╗∙▒Š╔Ž▒╗Ę┤╔õļxķ_Ż¼Å─Č°▓╗Ģ■▀M╚ļ▓©ī¦300ĪŻ
ĪĪĪĪłD3D╩Š│÷┴╦┼cłD3BŽÓ═¼Ą─┼õų├Ż¼Ą½¼Fį┌Ą┌Č■╔õŠĆ308Å─═Ō▓┐į┤╚ļ╔õĄĮĄ┌ę╗SBG 300–1╔ŽĪŻį┌Ą┌ę╗SBG 300–1╠Äė┌═Ė╔õĀŅæBĄ─ŪķørŽ┬Ż¼Ą┌╚²╣ŌŠĆ310═©▀^č▄╔õ▀M╚ļ▓©ī¦300Ż¼▓ó▒╗ę²ī¦ĄĮĄ┌ę╗▒Ē├µģ^ė“300–0ĪŻ
ĪĪĪĪłD3F╩Š│÷┴╦Ą┌Č■╣ŌŠĆ308╚ń║╬į┌▓©ī¦300ā╚ęįÖMĮž├µé„▓źŻ¼▓óŪęłD3EĄ─ŽÓ═¼├Ķ╩÷▀mė├Ż¼Ą½╣ŌŠĆĘĮŽ“ŽÓĘ┤ĪŻ
ĪĪĪĪSBGāHāH╩Ūėąį┤ķ_ĻPį¬╝■Ą─ę╗ĘN┐╔─▄ą╬╩ĮĪŻ└²╚ńī”ė┌Ų½š±╣Ō╩°Ż¼┐╔ęį╩╣ė├┐╔┐žŲ½š±×V▓©Ų„üĒīŹ¼FŽÓ═¼Ą─ą¦╣¹ĪŻSBG║═┐╔┐žŲ½š±×V▓©Ų„╩ŪĘŪÖCąĄėąį┤ķ_ĻPĄ─╩Š└²Ż¼╦³éā┐╔ęį═©▀^ĘŪÖCąĄą¦æ¬Ė─ūā▓©ī¦300Ą─╣ŌīWī┘ąįĪŻę²ī¦į¬╝■Ą─Ųõ╦¹īŹ└²░³└©┐╔┐žĘ┤╔õńRŻ¼└²╚ń╬óĘ┤╔õńRčbų├╗“Ųõ╦¹╬óÖCļŖŽĄĮy(MEM)Ż¼║¾š▀╩ŪÖCąĄę²ī¦į¬╝■Ą─īŹ└²ĪŻ
ĪĪĪĪ«ö╩╣ė├Ų½š±×V╣ŌŲ„ū„×ķę²ī¦į¬╝■ĢrŻ¼SBG 300–1Īó300–2┐╔ęįė├¤oį┤č▄╔õį¬╝■┤·╠µŻ¼Ų½š±×V╣ŌŲ„┐╔ęįĖ∙ō■ąĶę¬ęį┐╔┐žĄ─ĘĮ╩Įę²ī¦╣Ō╩°ĄĮ▀_╗“ļxķ_¤oį┤č▄╔õį¬╝■Ż¼Č°¤oąĶųžą┬┼õų├č▄╔õį¬╝■ĪŻ
ĪĪĪĪŽ┬├µ╩Ū▓©ī¦ŠWĮjĄ─ĮķĮBĪŻį┌ę╗éĆīŹ╩®└²ųąŻ¼┐╔ęį▓╔╚Īå╬éĆ▓©ī¦╗“ČÓéĆŽÓ╗ź±Ņ║ŽĄ─▓©ī¦ŠWĮją╬╩ĮĪŻ╬ó▄øųĖ│÷Ż¼Š▀ėąČÓéĆėąį┤ī¦╣Ō╣▄Ą─▓©ī¦ŠWĮjį┌ņ`╗ŅĄ─╣ŌīWöĄō■é„▌öĘĮ├µŠ▀ėą╠žäeĄ─ā×ä▌ĪŻ

ĪĪĪĪłD4A║═4B╩Š│÷┴╦░³└©Ą┌ę╗║═Ą┌Č■ėąį┤ī¦╣Ō╣▄400Īó420Ą─▓©ī¦ŠWĮj(Ą─ę╗▓┐Ęų)Ą─╠µ┤·é╚ęĢłDĪŻ
ĪĪĪĪĄ┌Č■ī¦╣Ō╣▄420Š▀ėąĄ┌ę╗▒Ē├µģ^ė“420–0Ż¼Ą┌ę╗▒Ē├µģ^ė“┼cĄ┌ę╗ī¦╣Ō╣▄400Ą─ŽÓæ¬▒Ē├µģ^ė“ŽÓÓÅ▓óī”²RŻ¼▓óė├ė┌Įøė╔Ą┌ę╗▒Ē├µģ^ė“400–0Å─Ą┌Č■▓©ī¦420Įė╩š╣Ō╩°╗“īó╣Ō╩°ę²ī¦ĄĮĄ┌Č■▓©ī¦ĪŻ
ĪĪĪĪ╣ŌŠĆ404═©▀^Ą┌ę╗▓©ī¦400é„▓źĄĮĄ┌ę╗▓©ī¦400Ą─ī”æ¬▒Ē├µģ^ė“Ż¼╦∙╩÷▒Ē├µģ^ė“╬╗ė┌Ą┌Č■▓©ī¦420Ą─Ą┌ę╗▒Ē├µģ^ė“420-0ĖĮĮ³ĪŻ╔õŠĆ404═©▀^▀BĮėĄĮĄ┌ę╗▓©ī¦400Ą─ŽÓÓÅ▒Ē├µģ^ė“Ą─SBG 400–1±Ņ│÷Ą┌ę╗▓©ī¦400Ż¼▓ó═©▀^Ą┌ę╗▒Ē├µģ^ė“400–0±Ņ║ŽĄĮĄ┌Č■▓©ī¦420ĪŻ
ĪĪĪĪÅ──Ū└’Ż¼╦³┐╔ęįęįę╗ī”ČÓĄ─ĘĮ╩Įę²ī¦ĄĮĄ┌Č■▓©ī¦420Ą─ČÓéĆSBG 420–1Īó420–2ųąĄ─╚╬║╬ę╗éĆĪŻŽÓ═¼Ą─▓╝ų├┐╔ęįė├ė┌ęįČÓī”ę╗Ą─ĘĮ╩Įį┌┴Ēę╗ĘĮŽ“╔Žīó╣Ō╩°Å─Ą┌Č■▓©ī¦420ę²ī¦ĄĮĄ┌ę╗▓©ī¦400ųąŻ¼Ųõųą╣ŌŠĆĘĮŽ“ŽÓĘ┤ĪŻ

ĪĪĪĪłD1A║═1B╩Š│÷┴╦╚½ŽóėøõøĮķ┘|102Ą─╩ŠęŌąį═ĖęĢłDįōĪŻŲõųąŻ¼╚½ŽóėøõøĮķ┘|╩Ūę╗¾wĘeŽÓī”▌^║±Ą─╣Ō├¶▓─┴ŽŻ¼─▄ē“│ųŠ├Ąž┤µā”ū„×ķ░³║¼į┌╚½ŽóėøõøĮķ┘|ā╚Ą─“╚½ŽółD”Ą─╣ŌīWłD░ĖĪŻ
ĪĪĪĪłD1A╩Š│÷┴╦×ķ┴╦īóę╗ĮMöĄō■īæ╚ļĮķ┘|102Ż¼▌ö╚ļ╣Ō╩°104║═ģó┐╝╣Ō╩°106╚ń║╬ĘųäeĮøė╔Įķ┘|102Ą─Ą┌ę╗║═Ą┌Č■é╚▒Ē├µ102-4Īó102-6▒╗ę²ī¦ĄĮūė¾wĘe110ųąĪŻ▀@«a╔·┴╦ė╔▌ö╚ļ╣Ō╩°104║═ģó┐╝╣Ō╩°106ų«ķgĄ─Ė╔╔µę²ŲĄ─Ė╔╔µłD░Ėą╬╩ĮĄ─╣ŌīWłD░ĖĪŻ
ĪĪĪĪ╚ń╣¹╣Ō╩°104Īó106Š▀ėąūŃē“Ą─╣”┬╩▓óŪęūė¾wĘe110▒╗Ųž╣ŌūŃē“Ą─│ų└mĢrķgŻ¼ätė╔Ė╔╔µ╣Ō╩°104Īó06«a╔·Ą─Ė╔╔µłD░Ėīó▒╗│ųŠ├Ąžėøõøį┌ūė¾wĘe110ā╚ū„×ķ╚½ŽółDĪŻę╗ĮMöĄō■▒╗ŪČ╚ļ▌ö╚ļ╣Ō╩°104ųąŻ¼▓óŪę┐╔ęįÅ─╦∙Ą├╚½ŽółDųą╗ųÅ═ĪŻęį▀@ĘNĘĮ╩ĮŻ¼ŠÄ┤aĄ─öĄō■╝»▒╗īæ╚ļūė¾wĘe110ĪŻöĄō■╝»┐╔ęįŠÄ┤a×ķöĄūųłDŽ±Ż¼╚╗║¾═©▀^┐šķgš{ųŲīóŲõŪČ╚ļ▌ö╚ļ╣Ō╩°104ųąĪŻ
ĪĪĪĪ╚ńłD1B╦∙╩ŠŻ¼×ķ┴╦Å─ūė¾wĘe110ūx╚ĪöĄō■Ż¼Ųź┼õĄ─ģó┐╝╣Ō╩°116═©▀^Įķ┘|102Ą─Ą┌Č■é╚▒Ē├µ102-6▒╗ę²ī¦ĄĮūė¾wĘe110ųąŻ¼į┌─Ū└’╦³┼c╚½ŽółDŽÓ╗źū„ė├ęį«a╔·▌ö│÷╣Ō╩°108ĪŻ▌ö│÷╣Ō╩°108īó┼cė├ė┌īæ╚ļ╚½ŽółDĄ─▌ö╚ļ╣Ō╩°104╗∙▒ŠŲź┼õĪŻ▌ö│÷╣Ō╩°108═©▀^Įķ┘|102Ą─Ą┌╚²é╚▒Ē├µ102-8é„▓ź│÷ūė¾wĘe110ĪŻ
ĪĪĪĪė├ė┌ūx╚ĪöĄō■Ą─ģó┐╝╣Ō╩°116╗∙▒Š╔Ž┼cūŅ│§ė├ė┌īæ╚ļöĄō■Ą─ģó┐╝▓©╩°106ŽÓŲź┼õŻ¼▓óŪę╠žäeĄžęį┼cįŁ╩╝ģó┐╝╣Ō╩°106Ą─ĮŪČ╚Šo├▄Ųź┼õĄ─ĮŪČ╚▒╗ę²ī¦ĪŻ▀@╩Ūę“×ķūx╚Ī╚½ŽółDĄ──▄┴”ī”Ęųäeė├ė┌īæ╚ļ║═ūx╚Ī╚½ŽółDĄ─ģó┐╝╣Ō╩°106Īó116ų«ķgĄ─ĮŪČ╚Ų½▓ŅĖ▀Č╚├¶ĖąĪŻ
ĪĪĪĪš²╩Ū▀@ĘNņ`├¶Č╚┐╔ęįė├üĒį┌═¼ę╗ūė¾wĘe110ā╚ėøõøČÓéĆ╚½ŽółDŻ¼├┐éĆ╚½ŽółDČ╝╩Ū╩╣ė├▓╗═¼Ą─ģó┐╝╣Ō╩°ĮŪČ╚äōĮ©Ż¼▓óŪę┐╔ęįäōĮ©ā╔éĆ▓╗═¼Ą─╚½ŽółDŻ¼Č°ģó┐╝╣Ō╩°ĮŪČ╚ų╗ėą╬óąĪĄ─▓Ņ«ÉĪŻęį▀@ĘNĘĮ╩ĮŻ¼┐╔ęįīó┤¾┴┐Ą─╚½ŽółDīæ╚ļ═¼ę╗ūė¾wĘe110ĪŻ

ĪĪĪĪłD2A╩Š│÷┴╦╩Š└²╚½Žó┤µā”ŽĄĮy200Ą─╩ŠęŌąį═ĖęĢłDĪŻŲõųąŻ¼╚²éĆå╬¬ÜĄ─▓©ī¦204Īó206║═208ė├ė┌│ą▌d▌ö╚ļ╣Ō╩°104Īóģó┐╝╣Ō╩°116Īó126║═▌ö│÷╣Ō╩°118Ż¼▓óŪę┐╔ęįå╬¬ÜĘQ×ķ▌ö╚ļ▓©ī¦204Īóģó┐╝▓©ī¦206║═▌ö│÷▓©ī¦208ĪŻ
ĪĪĪĪ▓©ī¦204Īó206║═208ųąĄ─├┐ę╗éĆČ╝╠ß╣®┐šķgÅ═ė├Ż¼ę“×ķ╦³┐╔ęįīóą┼╠¢ę²ī¦ĄĮ╚½ŽóėøõøĮķ┘|102ā╚Ą─ČÓéĆūė¾wĘeųąĄ─╚╬║╬ę╗éĆūė¾wĘe╗“Å─╚½ŽóėøõøĮķ┘|ā╚Ą─ČÓéĆūė¾wĘeųąĄ─╚╬ęŌę╗éĆūė¾wĘeę²ī¦ą┼╠¢ĪŻ
ĪĪĪĪ▀@į┌╚½ŽóėøõøĮķ┘|102Ą─¾wĘe╔Ž╠ß╣®┴╦┐šķgÅ═ė├Ż¼Č°▓╗ąĶę¬▓©ī¦204Īó206Īó208ųąĄ─╚╬║╬ę╗éĆŽÓī”ė┌╚½ŽóėøõøĮķ┘|Ą─╚╬║╬ÖCąĄ▀\äėĪŻ
ĪĪĪĪ×ķ┴╦▒▄├Ō▀@ĘNÖCąĄ▀\äėĄ─ąĶ꬯¼ę²ī¦į¬╝■╬╗ė┌▓©ī¦204Īó206Īó208ųąĄ─├┐ę╗éĆ╔Ž╗“ā╚Ż¼▓óŪę┐╔┼õų├×ķĖ─ūā▓©ī¦204Ż¼206Ż¼208Ą─╣ŌīWī┘ąįŻ¼ęį▒Ńīóą┼╠¢ę²ī¦ĄĮĮķ┘|102Ą─▓╗═¼ūė¾wĘe╗“Å─Įķ┘|102Ą─Ė„éĆūė¾wĘeę²ī¦ą┼╠¢ĪŻ
ĪĪĪĪōQŠõįÆšfŻ¼┐╔ęįĖ∙ō■ąĶę¬į┌▓©ī¦204Īó206Īó208ā╚äōĮ©▓╗═¼Ą─═©Ą└ĪŻ
ĪĪĪĪį┌╦∙╩÷╠žČ©╩Š└²ųąŻ¼ę²ī¦į¬╝■▓╔ė├ėąį┤╣ŌīWķ_ĻPį¬╝■Ą─ą╬╩ĮĪŻķ_ĻP┐╔ęį▓╔╚ĪČÓĘNą╬╩ĮĪŻį┌įō╩Š└²ųąŻ¼ķ_ĻP▓╔ė├SBGĄ─ą╬╩ĮŻ¼SBG╬╗ė┌▓©ī¦204Īó206Īó208Ą─▓╗═¼▒Ē├µģ^ė“ųąŻ¼┐é¾w▓╝ų├┼cłD3A-EŽÓ═¼ĪŻ
ĪĪĪĪ├┐éĆ▓©ī¦204Īó206Īó208▓╝ų├×ķŲõĄ┌ę╗▒Ē├µ(╝┤ŲõSBG╦∙į┌Ą─▒Ē├µ)┼cĮķ┘|102Ą─▓╗═¼é╚▒Ē├µŽÓÓÅŻ¼╩╣Ą├ŲõSBGčžų°Įķ┘|102Ą─įōé╚▒Ē├µčė╔ņĪŻ
ĪĪĪĪłD2Bų┴2D╩Š│÷┴╦╚ń║╬╩╣ė├▌ö╚ļ▓©ī¦204║═ģó┐╝▓©ī¦206ęįę╗ī”ČÓĄ─ĘĮ╩ĮīóöĄō■īæ╚ļĮķ┘|102ĪŻłD2B╩Š│÷┴╦ŽĄĮy200Ą─╩ŠęŌąįŲĮ├µłDŻ¼łD2C║═2D╩Š│÷┴╦╠µ┤·Ą─é╚ęĢłDŻ¼Ųõųą▌ö╚ļ▓©ī¦204║═ģó┐╝▓©ī¦206Ęųäe┐╔ęŖĪŻ▌ö╚ļ▓©ī¦404ė├ė┌ęį╔Ž╩÷ĘĮ╩ĮĮøė╔▌ö╚ļ▓©ī¦204Ą─SBG 404–1Īó404–2ųąĄ─╚╬ęŌę╗éĆīó▌ö╚ļ╣Ō╩°104ę²ī¦ĄĮĮķ┘|102Ą─ČÓéĆūė¾wĘeųąĄ─╚╬ęŌų«ę╗ĪŻ
ĪĪĪĪģó┐╝▓©ī¦406┼õų├×ķīóģó┐╝╣Ō╩°106═¼Ģrę²ī¦ĄĮŽÓ═¼Ą─ūė¾wĘeŻ¼ęį▒ŃäōĮ©ę¬īæ╚ļįōūė¾wĘeĄ─Ų┌═¹Ė╔╔µłD░ĖĪŻį┌╦∙├Ķ└LĄ─╩Š└²ųąŻ¼▌ö╚ļ▓©ī¦204║═ģó┐╝▓©ī¦206«öŪ░Č╝▒╗┼õų├×ķĮøė╔├┐éĆ▓©ī¦204Īó206Ą─Ą┌Č■SBG 204–2Īó206–2īó▌ö╚ļ╣Ō╩°104║═ģó┐╝╣Ō╩°106ę²ī¦ĄĮė╔ģó┐╝öĄūų110▒Ē╩ŠĄ─ūė¾wĘeĪŻ
ĪĪĪĪłD2Eų┴2G╩Š│÷┴╦ģó┐╝▓©ī¦206║═▌ö│÷▓©ī¦208┐╔ęį╚ń║╬ė├ė┌Å─Įķ┘|102ūx╚ĪöĄō■ĪŻłD2E╩ŪŲĮ├µłDŻ¼łD2F║═2G╩Š│÷┴╦╠µ┤·Ą─é╚ęĢłDŻ¼Ųõųąģó┐╝▓©ī¦204║═▌ö│÷▓©ī¦206╩Ū┐╔ęŖĄ─ĪŻ
ĪĪĪĪģó┐╝▓©ī¦206ęį┼cłD2Bų┴2D╦∙╩Š═Ļ╚½ŽÓ═¼Ą─ĘĮ╩Į╩╣ė├Ż¼Ą½¼Fį┌ė├ė┌īóģó┐╝╣Ō╩°116ę²ī¦ĄĮ╚╬║╬ūė¾wĘeŻ¼į┌▀@ĘNŪķørŽ┬Ż¼╚½ŽółDīóūx╚Īūė¾wĘe110ĪŻ▌ö│÷▓©ī¦208ęįę╗ī”ČÓĄ─ĘĮ╩Įė├ė┌ę²ī¦üĒūįūė¾wĘe110Ą─╦∙Ą├▌ö│÷╣Ō╩°108▓ó┤®▀^ų▒═©▓©ī¦208ęįė├ė┌ļS║¾Ą─Öz£yĪŻ
ĪĪĪĪ▌ö╚ļ▓©ī¦204║═ģó┐╝▓©ī¦206(▒Š└²ųą×ķSBG)Ą─ę²ī¦į¬╝■Ė∙ō■ąĶę¬▀Mąą┼õų├Ż¼▓ó×ķ▌ö╚ļ╣Ō╩°104║═ģó┐╝╣Ō╩°106Īó116╠ß╣®Å─╣Ō╩°į┤(░l╔õŽĄĮy)ĄĮę¬ūx╚ĪĄ─ūė¾wĘe108Ą─═©Ą└ĪŻī”ė┌SBGŻ¼▀@╩ŪĖ∙ō■ąĶę¬īóSBGįOų├×ķ═Ė╔õ╗“Ę┤╔õĀŅæBęįäōĮ©═©Ą└Ą─ŪķørĪŻŅÉ╦ŲĄžŻ¼▌ö│÷▓©ī¦208Ą─ę²ī¦į¬╝■įOų├×ķ╠ß╣®Å─▒╗ūx╚ĪĄ─ūė¾wĘe108ĄĮÖz£yŲ„Ą─═©Ą└ĪŻ
ĪĪĪĪ╚ń╔Ž╦∙╩÷Ż¼▀@į╩įSį┌Įķ┘|102╔Ž▀Mąą┐šķgÅ═ė├Ż¼Č°Įķ┘|102ø]ėąŽÓī”ė┌▓©ī¦204Īó206Īó208Ą─╚╬║╬ÖCąĄęŲäėĪŻ

ĪĪĪĪłD5╩Š│÷┴╦░³└©łD4╦∙╩ŠŅÉą═Ą─ČÓ▓©ī¦ŠWĮjĄ─╚½Žó┤µā”ŽĄĮy╩Š└²ĪŻ
ĪĪĪĪ▌ö╚ļ▓©ī¦ŠWĮj▒╗╩Š×ķ░³└©Ą┌ę╗▌ö╚ļī¦╣Ō╣▄203(─Ė▓©ī¦)Ż¼ČÓéĆĄ┌Č■▌ö╚ļī¦╣Ō╣▄204AĪó204B(ūė▓©ī¦)±Ņ║ŽĄĮĄ┌ę╗▌ö╚ļī¦╣Ō╣▄Ą└203ĪŻüĒūį░l╔õŲ„ŽĄĮy504Ą─▌ö╚ļ╣Ō╩°104Įøė╔Ą┌ę╗▌ö╚ļ▓©ī¦203Ą─±Ņ╚ļģ^ė“±Ņ║ŽĄĮĄ┌ę╗▌ö╚ļ▓©ī¦ųąŻ¼▓óŪę┐╔ęįÅ──Ū└’ę²ī¦ĄĮ╚╬║╬Ą┌Č■▌ö╚ļ▓©ī¦204AĪó204BųąĪŻ
ĪĪĪĪ╦∙├Ķ└LĄ─▓╝ų├į╩įS╣Ō╩°▒╗ę²ī¦ĄĮ/üĒūįČÓéĆ╚½Žó┤µā”Įķ┘|102AĪó102BĄ─▓╗═¼ūė¾wĘeĪŻ
ĪĪĪĪ├¹×ķ“Optical data transfer”Ą─īŻ└¹╔ĻšłūŅ│§į┌2021─Ļ3į┬╠ßĮ╗Ż¼▓óį┌╚šŪ░ė╔├└ć°īŻ└¹╔╠ś╦Šų╣½▓╝ĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
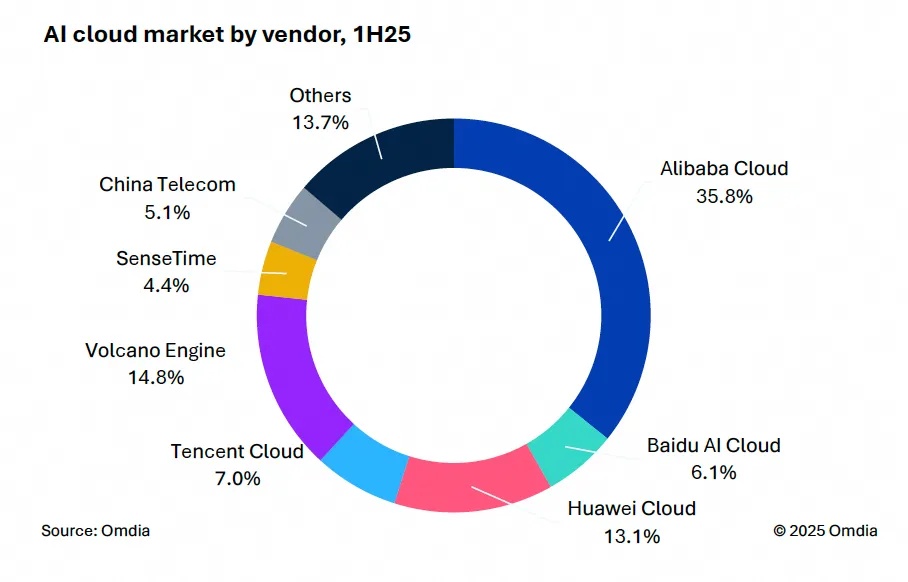
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ

IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.lixinerzhong.com ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w