ÀÀÀÀ§■àíȘÝ݃ˋ¤§¢í¤§äšÇµWCÅç¿Ê°ä¥¯æåÆ£₤Wå¤îŃ¢Fõ ô¤üøÅ¢óå¤èŸ¤ÈùªÀÂíЧÙǵWȘ°è¿Îîůl°—Ø£¢ŸèŸ¤ÈÅÀÅëÑÁáÈBCó¼àùȘüÁõPîŃ¢°è¿«ÆÖ3åô20àí¯lÝÚåÖ½ŠHÚ¥WÅgóÖ¢₤ÀÑ¢óW・Có¼àùÀñ(Science Robotics)èüÀÈåCó¼àùá·ª·Þ¶~çáÔ\ÆáÈò§øÅ¥°àÀš`¡ÅȘƒÔðÆöÆÀ£˜üÒÀÂéâÅÅçàÑÁñNÔ\ÆáÈò§È˜áÉ·åÖëŠs蟤ÈÙhƒ°øÅš`£ŸˆÎý£ë˜àöíÅÒúµÀÈ
ÀÀÀÀîŃ¢Fõ ÅôÅåçÄâ«ÆûòøÅåŠpñB°˜ýáêü§YȘ§ãQêù蟤ȡԤÙhƒ°üôàÃÅåýáêüÅåáÉùËpçáŠyŸ}ÀÈë´Ô^ŠpñBë£ä½CøóȘCó¼àùáÉ·åÖ0.75ûŠà˜FÆöÆécæÔÆçᢚùìúÅQȘýÂåÖ蟤ȡԤüôÝÈ°ø¡ÔÅÏ·ÆÅåáÉÀÈÇùëãȘFõ Ôâ«ÆûÅö ŸÆ¤ü§ÞçáçëÄäÄÅåȘåOÆêùáÉ·åÖ2-4ÀÌçëÄÙhƒ°üô¡ÔŸlîÙÙhæÅöçá·Æó¼È˜ÔMØ£ý§äÃè»êùCó¼àùåÖOÑùÙhƒ°øÅçáÔmˆÅåÀÈ
ÀÀÀÀåCó¼àùØîåÖáü¤È¤ÈþRâðàˆÀ»ö¼¤È觥¯þRâÿ¥{¤ÈüçàÑÁèŸ¤È ^Æ·ëõ°èçÄyåȘ°è¿ÎäÅÅêù¯■â´ÉµwèºöÿæËàÀÀÂØóÆø½õó¼çàëŠsàöíȘÕ蟤Èä§ù¼äÿˋêùÅôçᥥÅgòøÑöÀÈ
ÀÀÀÀöáíôààïH¿ˋÕæxȘý£°èëÑìY§´æhȘíøè¼ÎÇ»ÀÈëÑìYíÔ±Çùýìæ¼È˜ÿLŠUæåºÀÈ
¤Èµèº°èøÅ...

¤ÈùAIçááÈÅëüç§yåÖ½ŠHòÅ—èüVòɤûåuȘá¢ú¯íƒàâÜÆáÈÅëç°˜Ô^80àfȘ¤ÙèwÀÂѱÇöåˆÀÂýÍÛÀÂåOÆÀÂzƯÀÂÿL¡þ£₤DüþçàÑÁŸÅëˆÆû—ƒ¯È˜£ªÝƒ¡ýèwùªÆÅø¼ê¼æ¼ÿL¡þÀÈ
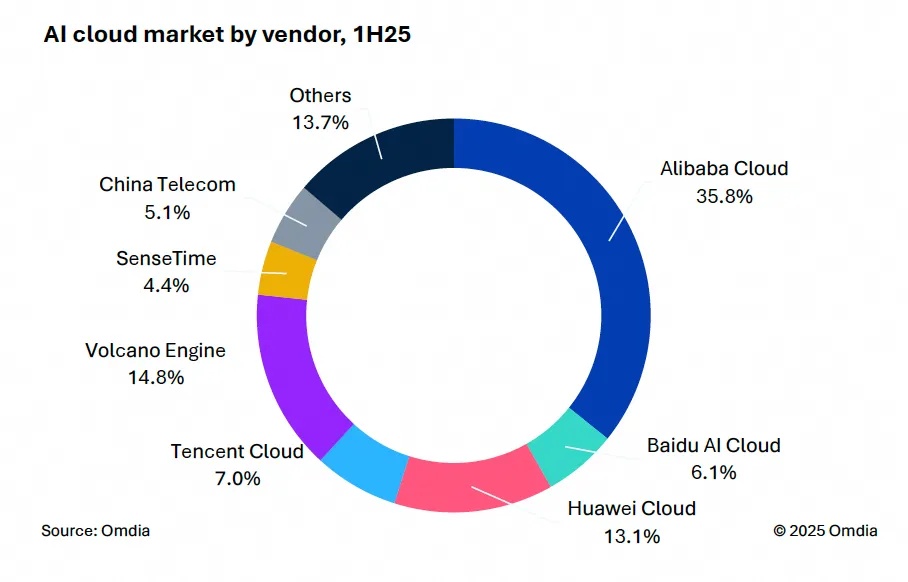
9åô9àíȘ½ŠHÁë±òÅ—í{îÅCÆ¡£ô■(Omdia)¯lý¥êùÀÑøŽAIåóòŗȘ1H25Àñµ¡ÌÀÈøŽAIåóòÅ—¯Ââÿåóí¥Ýà8%ö£êÅçÖØ£ÀÈ

9åô24àíȘàAÕâÊš`íìÕ_À¯øúáɵw·È˜Ø£óêç§ö£ÀÝàAÕIdeaHubúÏÅůìIµw·¿ìƯlý¥±ÀÈ

îéþR¿±æ·àíÅ«ý¥ëó°—袟Ÿ^Ǽò§ÑºCȘñøeòúó§¯ÍíþáÊçáYH-4000¤ëÆàÎåÙâÚçáYH-C3000ÀÈ

IDC§þàí¯lý¥çáÀÑà¨ú·øúáɥ؃ÆúÍCó¼àùåOðòÅ—¥ƒÑࡺܵ¡ÌȘ2025áõçÖѱ¥ƒÑàÀñÿ@òƒÈ˜èü¯Šáõà¨ú·øúáɥ؃ÆúÍCó¼àùòÅ—°—Ä1,2àfé_Șë˜Ýàå—ÕL33%Șÿ@òƒ°—óñŸéçáòÅ—ÅÒúµÀÈ

ñç£Äø¼Ú ˋÛ õPÆÖöØ ˋÛ ààïôüç ˋÛ ôüçöØ ˋÛ ûãÄôû¼ ˋÛ åÙÅôô ˋÛ ÕT¶¯Ì
Copyright www.lixinerzhong.com øÅöá¢ó¥¥ìYÆ 2009-2025 all rights reserved ƒWíƒôüçöÂÅé xishuinet
õPÌIå~ȤCITNews|CitnewsøÅöá¢ó¥¥ìYÆ|øÅöá¢ó¥¥ìYƃW|¢ó¥¥ìYƃW|øŽ¢ó¥¥ìYÆ|øŽ¢ó¥¥ÅôôƒW|øŽ¢ó¥¥ìYƃW|¢š¢ó¥¥|Åô¢ó¥¥|øÅöá¢ó¥¥çÇaŸ^lä|øÅöáØóÆÅôû§µw