ĪĪĪĪ╚š▒Š┴ó├³^┤¾īWĄ─Hiroyuki TomiyamaĮ╠╩┌ŅIī¦Ą─蹊┐łFĻĀūŅĮ³ķ_░l┴╦ę╗ĘN├¹×ķ“Dynamic Point-Pixel Feature Alignment Network”(DPPFA−Net)Ą─äōą┬─Żą═Ż¼ų╝į┌ĮŌøQ3D╬’¾wÖz£yųąī”ąĪ─┐ś╦Öz£y└¦ļyĄ─å¢Ņ}ĪŻįō─Żą═▓╔ė├┴╦ČÓ─ŻæBĘĮĘ©Ż¼Ū╔├ŅĄžĮY║Ž┴╦3D LiDARöĄō■║═2DłDŽ±Ż¼ęįį┌É║┴ė╠ņÜŌŚl╝■Ž┬╠ßĖ▀ąį─▄ĪŻ

ĪĪĪĪį┌─┐Ū░╝╝ąg’w╦┘░lš╣Ą─ÖCŲ„╚╦║═ūįäė±{±éŲ¹▄ćŅIė“Ż¼£╩┤_Ėąų¬ŁhŠ│ī”ė┌┤_▒Ż╣żū„║═Į╗═©Ą─░▓╚½┼cĖ▀ą¦ų┴ĻPųžę¬ĪŻé„ĮyĄ─3D╬’¾wÖz£yĘĮĘ©ų„ę¬╩╣ė├LiDARé„ĖąŲ„äōĮ©ŁhŠ│Ą─3D³cįŲŻ¼═©▀^╝ż╣Ō╩°┐ņ╦┘Æ▀├Ķ║═£y┴┐į┤ų▄ć·╬’¾w║═▒Ē├µĄ─ŠÓļxĪŻ╚╗Č°Ż¼āH╩╣ė├LiDARöĄō■┐╔─▄į┌É║┴ė╠ņÜŌŚl╝■Ž┬«a╔·š`▓ŅŻ¼ė╚Ųõ╩Ūį┌ėĻ╠ņĪŻ
ĪĪĪĪ×ķ┴╦ĮŌøQ▀@ę╗å¢Ņ}Ż¼┐ŲīW╝ęéāķ_░l┴╦ČÓ─ŻæB3D╬’¾wÖz£yĘĮĘ©Ż¼īó3D LiDARöĄō■┼cś╦£╩ŽÓÖC┼─özĄ─2D RGBłDŽ±ŽÓĮY║ŽĪŻ▒M╣▄2DłDŽ±║═3D LiDARöĄō■Ą─╚┌║Ž┐╔ęį«a╔·Ė³£╩┤_Ą─3DÖz£yĮY╣¹Ż¼Ą½╚į╚╗├µ┼Rę╗ŽĄ┴ą╠¶æŻ¼Ųõųą£╩┤_Öz£yąĪ╬’¾wė╚×ķ└¦ļyĪŻ
ĪĪĪĪDPPFA−Net─Żą═░³└©╚²éĆą┬Ęf─ŻēKĄ─ČÓéĆīŹ└²:Memory-based Point-Pixel Fusion (MPPF)─ŻēKŻ¼Deformable Point-Pixel Fusion (DPPF)─ŻēK║═Semantic Alignment Evaluator (SAE)─ŻēKĪŻMPPF─ŻēKžōž¤į┌─ŻæBā╚▓┐╠žš„(2D┼c2D║═3D┼c3D)ęį╝░─ŻæBķg╠žš„(2D┼c3D)ų«ķgł╠ąą├„┤_Ą─Į╗╗źŻ¼═©▀^īó2DłDŽ±ū„×ķā╚┤µÄņŻ¼ĮĄĄ═ŠWĮjīW┴ĢļyČ╚Ż¼╠ßĖ▀ī”3D³cįŲųąįļ┬ĢĄ─¶ö░¶ąįĪŻ
ĪĪĪĪ┼c┤╦ŽÓĘ┤Ż¼DPPF─ŻēKāHį┌ĻPµI╬╗ų├Ą─Ž±╦ž╔Žł╠ąąĮ╗╗źŻ¼═©▀^ųŪ─▄▓╔śė▓▀┬į┤_Č©▀@ą®╬╗ų├Ż¼Å─Č°į┌Ą═ėŗ╦ŃÅ═ļsąįŽ┬ęįĖ▀Ęų▒µ┬╩╚┌║Ž╠žš„ĪŻūŅ║¾Ż¼SAE─ŻēKį┌╚┌║Ž▀^│╠ųą┤_▒Żā╔ĘNöĄō■▒Ē╩Šų«ķgĄ─šZ┴xī”²RŻ¼ŠÅĮŌ╠žš„─Ż║²å¢Ņ}ĪŻ
ĪĪĪĪ蹊┐╚╦åT═©▀^┼cÅVĘ║╩╣ė├Ą─KITTI Vision BenchmarkųąĄ─▒Ē¼FūŅ╝č─Żą═▀Mąą▒╚▌^Ż¼£yįć┴╦DPPFA−NetĄ─ąį─▄ĪŻųĄĄ├ūóęŌĄ─╩ŪŻ¼į┌▓╗═¼įļ┬ĢŚl╝■Ž┬Ż¼╠ß│÷Ą─ŠWĮjį┌ŲĮŠ∙Š½Č╚ĘĮ├µ╚ĪĄ├┴╦Ė▀▀_7.18%Ą─Ė─▀MĪŻ×ķ┴╦▀Mę╗▓Į£yįć─Żą═Ą──▄┴”Ż¼łFĻĀ═©▀^į┌KITTIöĄō■╝»ųąę²╚ļ╚╦╣żČÓ─ŻæBįļ┬Ģ(╚ńėĻ╦«)Ż¼äōĮ©┴╦ę╗éĆą┬Ą─ÓąļsöĄō■╝»ĪŻ
ĪĪĪĪĮY╣¹’@╩ŠŻ¼┼c¼Fėą─Żą═ŽÓ▒╚Ż¼įōŠWĮj▓╗āHį┌├µī”ć└ųžš┌ō§Ģr▒Ē¼FĖ³║├Ż¼Č°Ūęį┌▓╗═¼╦«ŲĮĄ─É║┴ė╠ņÜŌŚl╝■Ž┬ę▓Ė³×ķ│÷╔½ĪŻTomiyamaĮ╠╩┌▒Ē╩Š:“╬ęéāī”KITTIöĄō■╝»║═Š▀ėą╠¶æąįĄ─ČÓ─ŻæBÓąļs░Ė└²▀MąąĄ─ÅVĘ║īŹ“×▒Ē├„Ż¼DPPFA-Net▀_ĄĮ┴╦ą┬Ą─╝╝ąg╦«ŲĮĪŻ”
ĪĪĪĪ£╩┤_Ą─3D╬’¾wÖz£yĘĮĘ©į┌Ė─╔Ų╬ęéāĄ─╔·╗ŅĘĮ├µėąČÓĘNØōį┌æ¬ė├ĪŻę└┘ćė┌▀@ą®╝╝ągĄ─ūįäė±{±éŲ¹▄ćėą═¹£p╔┘╩┬╣╩Īó╠ßĖ▀Į╗═©┴„Ģ│Č╚║═░▓╚½ąįĪŻ┤╦═ŌŻ¼į┌ÖCŲ„╚╦ŅIė“Ą─ė░Ēæę▓▓╗┐╔║÷ęĢĪŻTomiyamaĮ╠╩┌ĮŌßīšf:“╬ęéāĄ─蹊┐┐╔ęį┤┘▀Mī”ÖCŲ„╚╦ī”╣żū„ŁhŠ│Ą─Ė³║├└ĒĮŌ║═▀mæ¬Ż¼īŹ¼Fī”ąĪ─┐ś╦Ė³Š½┤_Ą─Ėąų¬ĪŻ”
ĪĪĪĪDPPFA−NetĄ─═Ų│÷ś╦ųŠų°ČÓ─ŻæB3D╬’¾wÖz£yŅIė“Ą─ę╗ĒŚųž┤¾▀Mš╣Ż¼ėą═¹×ķ╔ŅČ╚īW┴ĢĖąų¬ŽĄĮyĄ─įŁ╩╝öĄō■ŅAś╦ūó╠ß╣®ą┬Ą─┐╔─▄ąįŻ¼Å─Č°’@ų°ĮĄĄ═╩ųäėūóßīĄ─│╔▒ŠŻ¼╝ė╦┘įōŅIė“Ą─░lš╣ĪŻ
ĪĪĪĪ╬─š┬ā╚╚▌āH╣®ķåūxŻ¼▓╗śŗ│╔═Č┘YĮ©ūhŻ¼šłųö╔„ī”┤²ĪŻ═Č┘Yš▀ō■┤╦▓┘ū„Ż¼’LļUūįō·ĪŻ
║Żł¾╔·│╔ųą...

║Ż╦ćAIĄ──Żą═ŽĄĮyį┌ć°ļH╩ął÷╔ŽÅV╩▄║├įuŻ¼─┐Ū░šŠā╚└█ėŗ─Żą═öĄ│¼▀^80╚féĆŻ¼║Ł╔wīæīŹĪóČ■┤╬į¬Īó▓Õ«ŗĪóįOėŗĪóözė░Īó’LĖ±╗»łDŽ±Ą╚ČÓŅÉą═æ¬ė├ł÷Š░Ż¼╗∙▒ŠĖ▓╔w╦∙ėąų„┴„äōū„’LĖ±ĪŻ
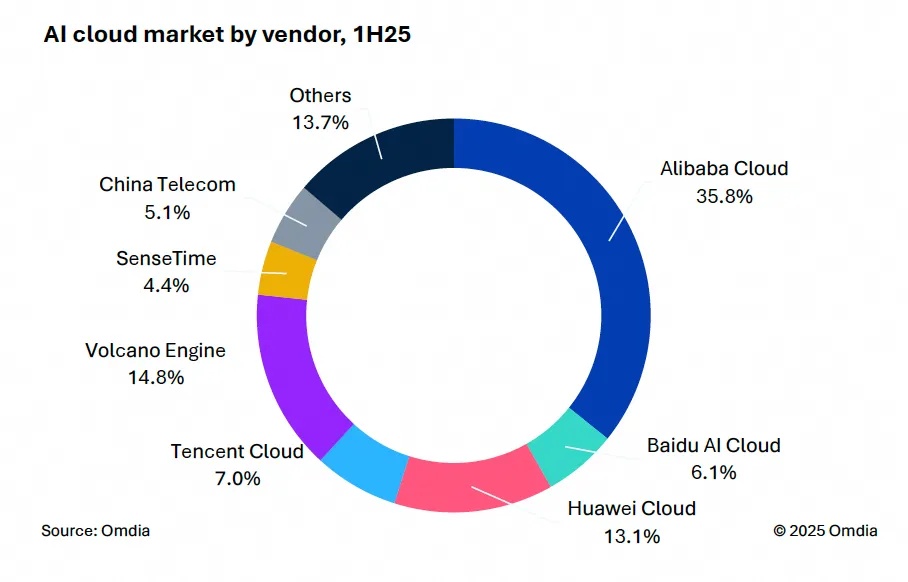
9į┬9╚šŻ¼ć°ļHÖÓ═■╩ął÷š{čąÖCśŗėóĖ╗┬³(Omdia)░l▓╝┴╦ĪČųąć°AIįŲ╩ął÷Ż¼1H25ĪĘł¾ĖµĪŻųąć°AIįŲ╩ął÷░ó└’įŲš╝▒╚8%╬╗┴ąĄ┌ę╗ĪŻ

9į┬24╚šŻ¼╚A×ķ└żņ`š┘ķ_Ī░ųŪ─▄¾w“ׯ¼ę╗Ų┴ĄĮ╬╗Ī▒╚A×ķIdeaHubŪ¦ąą░┘śI¾w“×╣┘ėŗäØ░l▓╝Ģ■ĪŻ

č┼±R╣■ū“╚šą¹▓╝═Ų│÷ā╔┐ŅŅ^┤„╩ĮČ·ÖCŻ¼Ęųäe╩ŪŲĮ░Õš±─żĄ─YH-4000║═äė╚”įŁ└ĒĄ─YH-C3000ĪŻ

IDCĮ±╚š░l▓╝Ą─ĪČ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦įOéõ╩ął÷╝ŠČ╚Ė·█Öł¾ĖµŻ¼2025─ĻĄ┌Č■╝ŠČ╚ĪĘ’@╩ŠŻ¼╔Ž░ļ─Ļ╚½Ū“ųŪ─▄╝ęŠėŪÕØŹÖCŲ„╚╦╩ął÷│÷žø1,2╚f┼_Ż¼═¼▒╚į÷ķL33%Ż¼’@╩Š│÷ŲĘŅÉÅŖä┼Ą─╩ął÷ąĶŪ¾ĪŻ

ĘĄ╗žų„Ēō ®« ĻPė┌╬ęéā ®« ā╚╚▌┬ōŽĄ ®« ┬ōŽĄ╬ęéā ®« ├Ōž¤┬Ģ├„ ®« įŁäōą┬┬ä ®« ķTæ¶░µ
Copyright www.lixinerzhong.com ųą╬─┐Ų╝╝┘YėŹ 2009-2025 all rights reserved ŠWšŠ┬ōŽĄ╬óą┼ xishuinet
ĻPµIį~Ż║CITNews|Citnewsųą╬─┐Ų╝╝┘YėŹ|ųą╬─┐Ų╝╝┘YėŹŠW|┐Ų╝╝┘YėŹŠW|ųąć°┐Ų╝╝┘YėŹ|ųąć°┐Ų╝╝ą┬┬äŠW|ųąć°┐Ų╝╝┘YėŹŠW|┐ņ┐Ų╝╝|ą┬┐Ų╝╝|ųą╬─┐Ų╝╝öĄ┤aŅ^Śl╠¢|ųą╬─ęŲäėą┬├Į¾w